| 続いて脚部を作りましょう。 完成した脚部のイメージは下図の通りです↓(図48)。これを目指して作業を進めます。
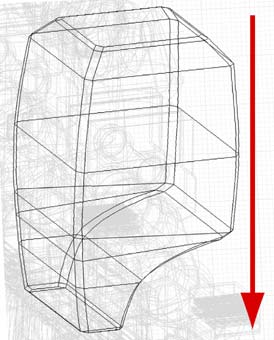
まずは腿(もも)の形状を作ります。 作り方は実に簡単で、四角い線形状を上から下へ拡大縮小しながらコピペし、自由曲面パートに入れるだけ。↓(図49)。 エッジを面取りしたり、途中の曲面を調整したりして仕上げましょう。
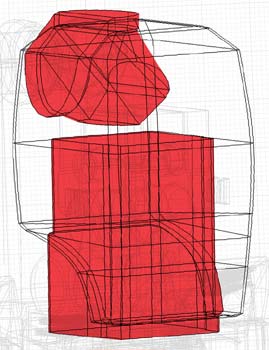
基本形状はこれで良いですが、股関節やヒザ関節を仕込むために一部をくり抜いてやる必要があります。その作業はブーリアン演算で行います。 図50を見て下さい↓。赤で示してある形状がブーリアンの種形状です。この形で腿をくり抜き、間接を仕込む穴を開けてやります。
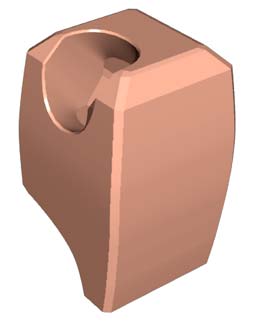
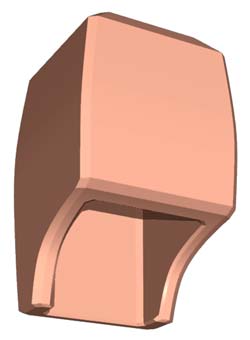
くり抜いた状態をレンダリングしたのが下の図です↓。
腿の形状はこれで完成です。 これを股関節によって腰のパーツ(いわゆるフンドシ部)に接続するワケですが、股関節は下の(図53)↓のような簡単なものです。
腿を前後や横にスイングできるようになっているのがお分かりと思います。また基部では横方向への伸縮が出来るようになっています。 次にすねの部分を作りましょう。 ここは「すね本体」「ふくらはぎ」「ひざアーマー」という3つのパーツによって成っています。 最初はふくらはぎのパーツを作ります。 作り方は腿と同じで、断面形の線形状を上から下へ変形しながらコピーし、自由曲面パートへ入れます(図54)。 それぞれの線形状を傾けたりしなければならないので、バランス取りがやや難しいかも知れません。
次にすね本体を作りますが、ここは簡単。 腿やふくらはぎと同様、断面形を上から下へと複製しながら並べていくワケですが、断面形がシンプルなのでアッと言う間に出来てしまいます(図54)。
次にヒザアーマーを作ります。 作り方はこれも同様で、コの字形の断面形を上から下へ円弧を描くように複製、配置して自由曲面にします。中央部のアールに気を付けながら整形する必要があります(図56)。
3つのパーツが出来たら、それらを合体してすねにします↓(図57)。 それぞれの接合部は「記憶」→「適用」ツールを使ってCP同士を貼り付けましょう。
合体させたすねパーツをレンダリングしたのが↓(図58)です。 まずまず上手く形になっているようですね。
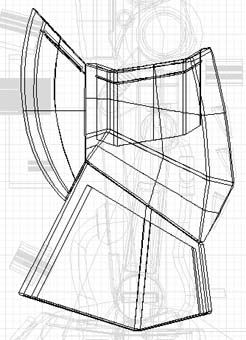
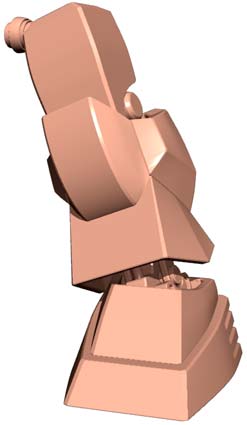
次に足首を作ります。 ここは大まかに上下2つのパーツに分かれていますから、その通りに別パーツとして作ってやります。 ↓下の(図59)は上のパーツを作ってみたところです。 腿などと同様、上から下へ閉じた線形状をコピペして配置、自由曲面にします。しかる後にCPを移動して形を調整します。
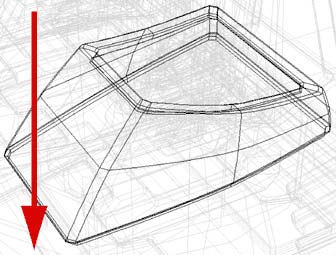
続いて下側のパーツも同様に作りましょう↓(図60)
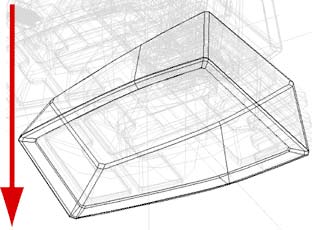
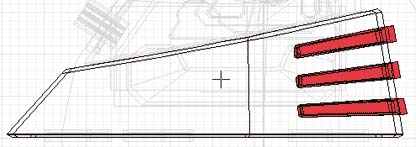
この下パーツは基本的には単純な形状ですが、カカトの部分にミゾが彫られているのが厄介です。 バンプマッピングで擬似的にへこませるのがイチバン簡単ですが、それだとどうしても浅いミゾにしか見えません。そこで腿と同様、ブーリアンモデリングで形状をくり抜くことにします。 下の↓(図61)が、ブーリアンの種形状を配したところです。赤い部分がくり抜く部位になります。
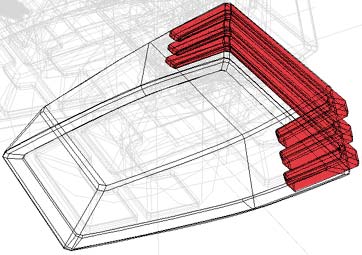
透視図で見ると↓(図62)のようになります。3本のミゾをくり抜くように種形状を配してあります。
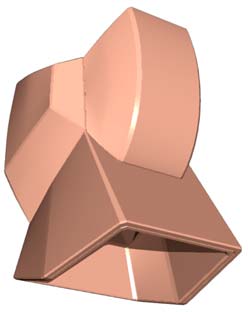
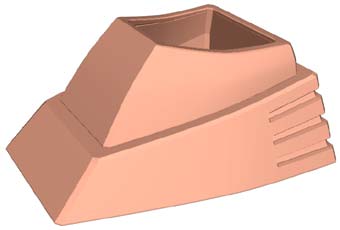
こうして作った上下のパーツを合体し、レンダリングしたのが下の↓(図63)です。 ミゾも上手くくり抜けたようです。これで足首の形状は完成です。
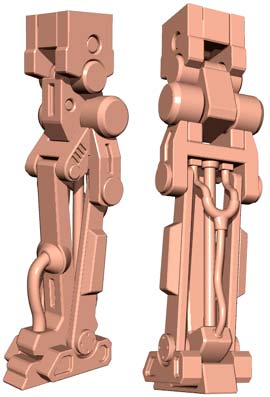
脚の外装パーツはこれでそろったので、次にそれらを組み合わせていきます。 ダグラムのメカは、アニメロボとしては恐らく初めて、本格的なフレーム構造が設定されていますから、それを作って内部に入れてやり、各パーツを繋ぎます。 設定されているフレームは↓(図64)のような形状になっています(少しアレンジしていますが)。
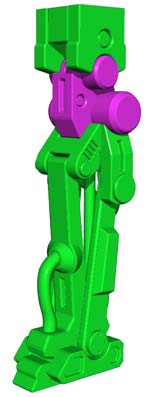
複数のヒンジやシリンダーによって構成されているのがお分かりと思います。 それらの構造を全て動かすことも可能ですが、制御が大変ですし、どうせ少ししか見えない部位ですから、手間に見合う作業とも思えません。 そこで可動部は一カ所に限定し、その他のヒンジ等は全てダミーとします。↓(図65)を見て下さい。
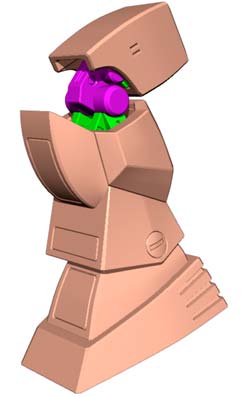
ピンク色の部分がヒザ関節で、ここを中心に、その上下(緑色の部分)が一体でヒンジ回転するようにします。その際シリンダー等は連動しないわけです。 実際に回転させたところが↓(図66)です。
これはつまり、ヒザを曲げた状態になります。 外装を被せてみると、↓(図67)のようになります。
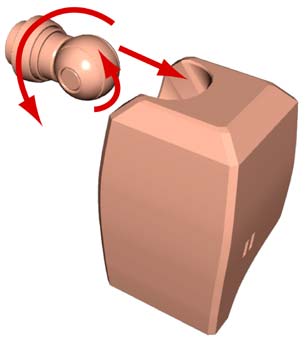
フレームがむき出しになりすぎているのが気になる場合は、最近のガンダムプラモのように、ヒザーアーマーを連動でスライドさせたりして間接部を隠す工夫をしてみるのも良いでしょう。ダグラムメカには不似合いのように思うので、あたしはやっていませんが。 最後に足首の可動について説明します。↓(図68)を見て下さい。
赤い2つの丸は、足首を左右にスイングさせるための支点です。胴体部の制作でも説明しましたが、右回転と左回転で支点を別にしてあるわけです。 下の↓(図69)は、実際にスイングさせてみたところです。
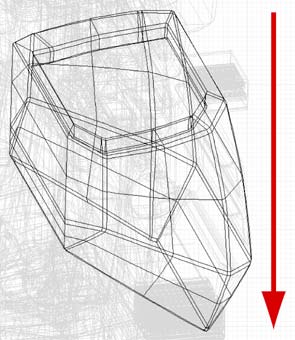
スイングする方向によって支点を切り替え、パーツ同士が干渉することをなるべく防いでいるのがお分かりと思います。 構造としてリアルかどうかはともかく、制御のしやすさという意味から取り入れているテクニックです。 このやり方は、スイングの方向が前後方向の時にももちろん有効です。↓(図70)を見て下さい。
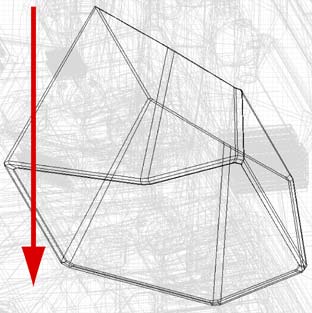
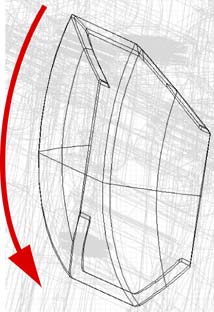
2つの赤丸は、足首を前後にスイングさせるための支点です。 左右のスイングと同様、回転方向によって別に支点を設けているわけです。 実際にスイングさせてみたところが、下の↓(図71)です。
支点を足首の中央に1つだけ設けるよりも、パーツ同士の干渉が少なくなっているのがお分かりと思います。 これで脚部の基本的な形状とジョイントは完成です。組み合わせてポーズを取らせてみると、↓(図72)のようになります。
単純な形状の組み合わせですが、まずまずロボの脚らしく出来ました。 フレーム構造の連動を再現したり、もっと精密に作り込むことももちろん可能ですが、それは作る人の好みやマシン環境によって塩梅してやれば良いことで、正解などは最初からありません。 ホビーですから、楽しく作ることがイチバン肝要ですよね。 |


|
4 |
||||